
C’era una volta l’impianto elettrico: fino a non più di una decina di anni fa, anche se la tecnologia aveva già fatto largo ingresso all’interno delle nostre motociclette, l’ossatura dei diversi dispositivi, elettrici ed elettronici, era ancora di tipo tradizionale.
Grovigli di fili, connessioni e fusibili che come diramazioni di un complesso sistema nervoso si dipanavano da una parte all’altra del telaio, costituendo il più delle volte un’inestricabile ramificazione capace di fare impazzire anche il miglior elettrauto.
La sempre maggiore accessibilità tecnologica e la necessità di semplificare gli impianti, almeno in linea di principio, hanno quindi portato negli ultimi tempi a una sostanziale modifica, anche concettuale, dell’impianto elettrico di tipo classico.
L’impianto elettrico classico
Innanzitutto, occorre riassumere in breve il funzionamento di un sistema tradizionale, costituito da numerose connessioni punto-punto, in numero pari o superiore agli utilizzatori e su ciascuna delle quali scorre semplicemente una corrente elettrica. In parole povere, su un vecchio Monster 900, anche una singola lampadina è direttamente collegata alla batteria, seppur con l’ovvia interposizione di un interruttore o di un fusibile.

Ogni dispositivo ha così la propria linea dedicata, contraddistinta da un filo elettrico con guaina di colore caratteristico per quel particolare utilizzatore. Come si può ben immaginare, un impianto così costituito è facilissimo da concepire, ma assai laborioso da realizzare e, soprattutto, da distribuire efficacemente lungo il traliccio di una compatta bicilindrica.
Peraltro, la sua revisione, modifica o riparazione non richiede né nozioni né strumenti particolarmente complessi: basta un minimo di manualità e al più un multimetro (tester) per venire a capo di ogni problema, disponendo unicamente di molta pazienza e perseveranza.
Dall’altro lato, la presenza di un enorme numero di fili elettrici aumenta proporzionalmente la possibilità di guasti e, ultimo ma non meno importante, il peso complessivo della moto.
L’impianto elettrico col BUS
Poi, un giorno, è finalmente arrivato il Bus, che non è solo un mezzo di trasporto, ma soprattutto un diverso modo di concepire e realizzare l’impianto elettrico di una motocicletta. In particolare, mentre nel sistema tradizionale ogni periferica ha la propria linea su cui viaggia unicamente un segnale di corrente, il Bus è un unico canale comune che consente ai vari componenti del sistema di “dialogare” tra loro.
Praticamente, possiamo concepirlo come un unico tronco con tante ramificazioni corrispondenti ai diversi utilizzatori; laddove nelle connessioni punto-punto i vari dispositivi possono essere collegati tra loro solo attraverso la moltiplicazione delle connessioni e l’adozione di centraline di controllo.

L’adozione di un Bus per lo scambio di dati è d’altronde da sempre alla base del funzionamento dei nostri computer casalinghi: la stessa conosciutissima sigla Usb (Universal Serial Bus) non fa altro che identificare un particolare tipo di Bus, oggi adoperato per interfacciare un’enormità di oggetti, dall’iPod, alla stampante, al forno a microonde!
Ciò che essenzialmente distingue un sistema con Bus da un altro è il protocollo di comunicazione.
In ogni caso, il funzionamento si basa sempre sul “dialogo” tra due dispositivi, uno che fa una richiesta (master) e l’altro che risponde (slave), liberando subito dopo il canale di comunicazione per le necessità di qualsiasi altro utilizzatore.
Il protocollo Can-Bus
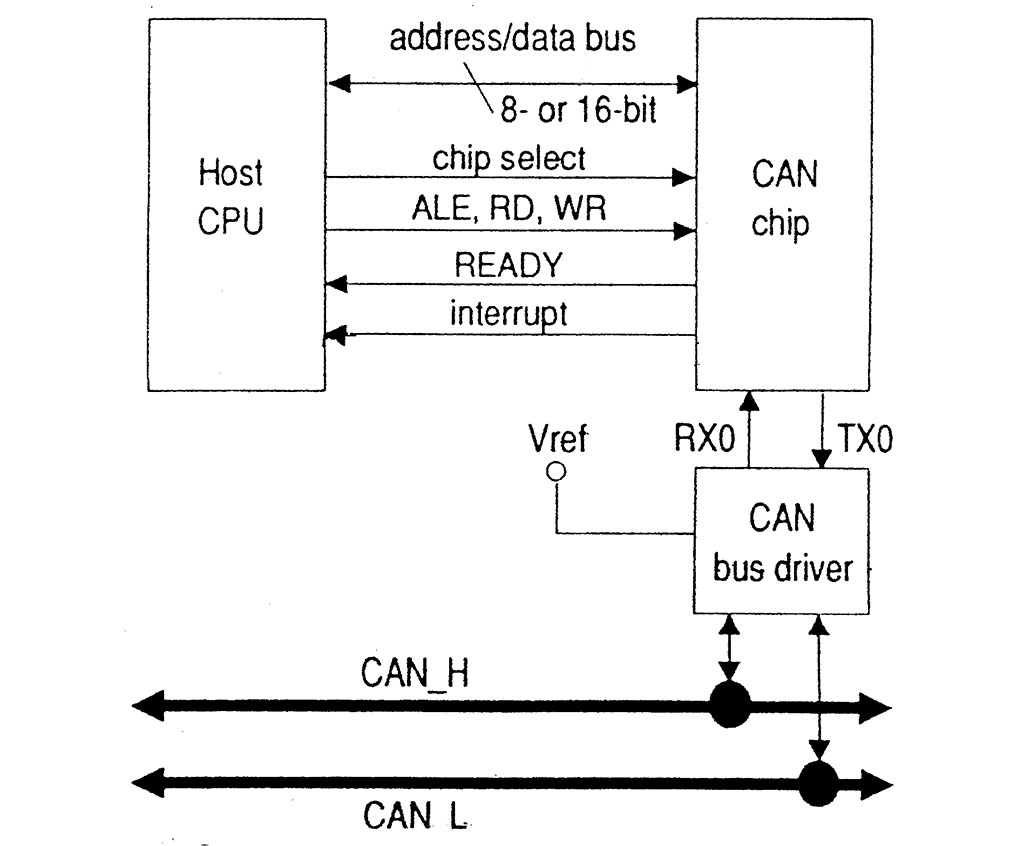
Il protocollo adoperato sui mezzi di trasporto è del tipo Can-Bus, dove la prima sigla è l’acronimo di Controller Area Network, che ben rappresenta la vera e propria rete di collegamenti esistente tra i vari dispositivi (comunemente detti anche nodi). L’efficienza di questo sistema è tale da essere stato reso norma internazionale nel 1993 (ISO 11898-1) ed è di fatto lo standard attuale per i veicoli di qualità.
Come già l’Usb, anche il Can-Bus è caratterizzato da una comunicazione seriale: i dati cioè scorrono in successione uno dietro l’altro e non parallelamente; l’alta velocità di trasmissione (1 Mbit/s) rende pressoché immediata la comunicazione (cioè, come si dice, essa avviene in tempo reale) ed è comunque garantita un’eccellente capacità d’individuazione e confinamento degli errori.
Come funziona, dunque, il tutto?
I dati trasmessi da un nodo all’interno del Can-Bus non hanno un destinatario definito, né viene contrassegnato il mittente. L’unica identificazione riguarda il contenuto del messaggio (per esempio, il regime motore, la temperatura dell’acqua, l’accensione della freccia sinistra, ecc), univoco per tutta la rete e per ciascun segnale. Il Bus trasmette questo messaggio a tutti i nodi in rete e ognuno verifica l’accettabilità dello stesso secondo la propria pertinenza (il modulo comando luci, ad esempio, ignorerà un segnale di fuorigiri), eventualmente processandolo se e solo se è di sua competenza.
In parole povere, è come se venissero messe nella stessa cassetta postale delle lettere senza destinatario né mittente, ma solo con un oggetto riguardante il contenuto; ogni persona interessata dovrebbe volta per volta verificare se l’oggetto è di suo interesse, eventualmente prelevando la busta oppure lasciandola al suo posto. Ecco dunque che un processo chiaramente assurdo dal punto di vista logico diventa efficacissimo sul piano elettronico, data la possibilità di processare un grande numero di dati in pochissimo tempo.
Ovviamente, la logica del Can-Bus prevede un ordine di priorità che evita sia il ritardo nella trasmissione dei dati più importanti che il conflitto tra due o più nodi che tentino di trasmettere nel medesimo istante, senza che alcun segnale vada ovviamente perduto.
E’ chiaro come vi sia nel sistema una complicazione implicita che consiste nella necessità di disporre di nodi che siano in grado di processare i dati che arrivano dal Bus.
Tuttavia, l’attuale miniaturizzazione dei componenti e il loro relativo costo rispetto a non più di una decina di anni fa, risolve brillantemente ogni problematica di questo tipo.
La linea Can-Bus viene implementata per la prima volta su un mezzo a due ruote nel 2002, sulla modernissima Ducati 999, dove il quadro strumenti può interagire attivamente con la ECU (unità di controllo motore) Magneti Marelli M59.
Mantenendo inalterata la struttura di base dell’impianto elettrico, questa importante innovazione permette di modificare e migliorare l’interazione tra i vari componenti, permettendo lo sviluppo di tutte le successive versioni e motorizzazioni.

La vera rivoluzione è costituta dal quadro strumenti digitale, un’unità molto leggera e funzionale che, grazie al Can-Bus, consente di monitorare tutte le informazioni provenienti dai vari nodi distribuiti sulla moto: oltre alla canonica velocità istantanea o alla temperatura del motore, sono rese disponibili informazioni supplementari come la tensione della batteria, la temperatura dell’aria e il consumo di carburante.
E’ implementato anche un sistema di monitoraggio dei tempi sul giro, che può avvalersi di un rilevatore a infrarossi (opzionale), oppure dell’intervento del pilota sul pulsante di avviamento.
Quest’ultimo, infatti, è un nodo del Can-Bus e non è più collegato direttamente con il ruttore di avviamento come sui modelli precedenti: gli si possono così attribuire funzioni diverse in base alle necessità (e, chiaramente, a veicolo in movimento può essere eliminata la funzione originale).
Nel cruscotto possono essere memorizzate numerose ulteriori informazioni, come la velocità massima effettiva, il massimo regime di rotazione del motore, l’accensione delle spie di fuorigiri e il tempo impiegato, il tutto per ciascun giro effettuato in pista.
Il nuovo protocollo di comunicazione si rivela utile anche per la gestione delle varie spie, come le già citate “over-rev” indicanti il fuorigiri: i nodi ad esse collegati percepiscono e segnalano informazioni riguardanti un regime motore inferiore di 200 e 100 giri rispetto a quello massimo, segnalandolo al pilota.
Ancora, al momento dell’avviamento del propulsore, il nodo comando luci ne determina lo spegnimento per ridurre l’assorbimento di corrente nei confronti della batteria, mentre sparisce la classica intermittenza per le frecce e viene implementato un efficace sistema antifurto immobilizer.
Queste e numerosissime altre funzioni vengono attivate per via elettronica in maniera semplicissima grazie alla nuova tecnologia, laddove il sistema tradizionale avrebbe richiesto un’intricata distribuzione di ulteriori fili elettrici, relais e interruttori. La semplificazione “fisica” del Can-Bus è palese sugli ultimi Monster “classici”, dove il traliccio viene liberato da tutti quei cavi e fascette che ne hanno da sempre compromesso in parte l’estetica.
Il futuro è chiaramente tracciato e l’unica controindicazione per l’appassionato delle moto bolognesi è dato dalla sempre minor possibilità di intervento sulla propria cavalcatura, a meno di non disporre di strumentazioni e nozioni di un certo livello. Il tutto va a vantaggio dell’affidabilità e dell’efficienza della moto ma, probabilmente, a qualcuno lascia anche un po’ di amaro in bocca!

SBK a Jerez: avanti tutta!
A Jerez de la Frontera, seconda tappa del campionato SBK, si ri-accende lo spettacolo con Ducati protagonista. Doppietta di Redding e secondo posto in gara 2 per Davies.

Monster 900 special: leggerezza e prestazioni
Non certo un’elaborazione estetica, quella operata sul suo Monster 900 da Andrea Cattaneo, che invece ha puntato sull’alleggerimento e sulle prestazioni.

![Ducati Streetfighter V4 MY21 [Foto]](https://www.cuoredesmo.com/wp-content/uploads/2020/10/MY21_DUCATI_STREETFIGHTER_V4S-_7__UC202891_Mid-300x200.jpg)
